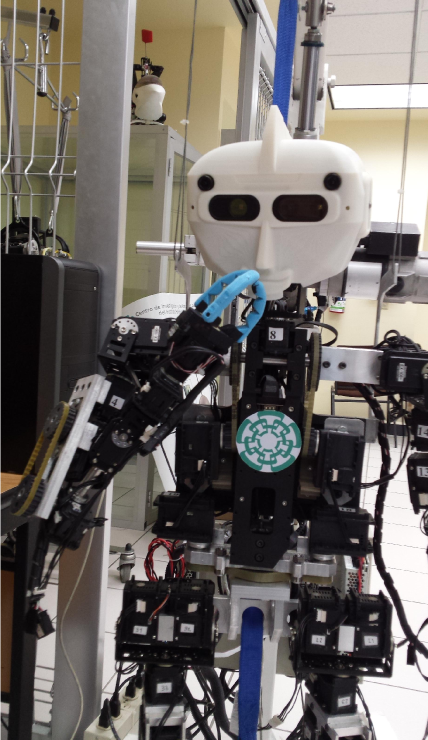

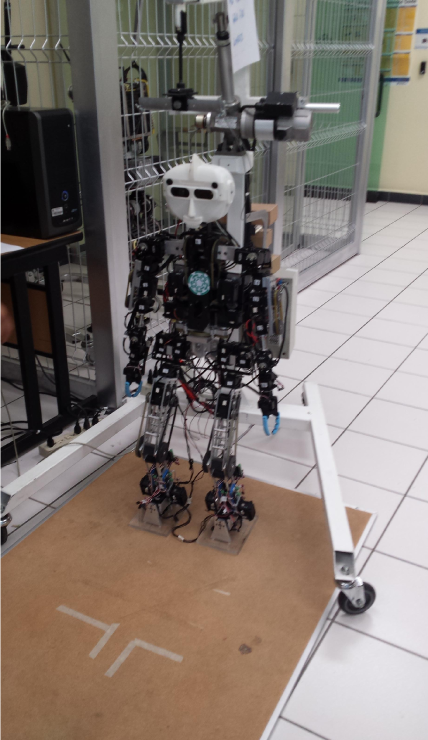
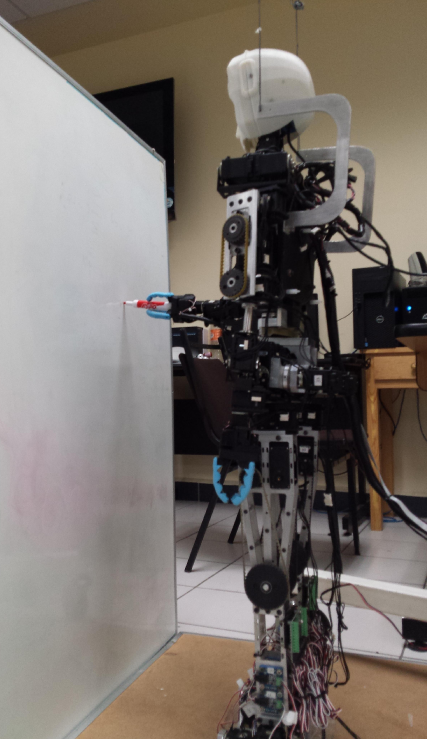
MexOne is a low cost full-sized biped humanoid robotics research platform. It’s flexible, open-source and upgradable.
It's powered by different actuators such as RX, MX Dynamixel motors series and screw gears which can reach a nominal torque of 18Nm for each joint.
The GPU/CPU onboard system uses a NVIDIA Jetson Tx1 connected with a powerful depth camera. These allows the online implementation of control algorithms, motion planning and perception.
This robot has been used to generate human-like gait which is based in mathematical models such as 3D-LIPM, cart-table model and whole-body dynamics. These models allowed the generation of control laws using theoretical analysis of stability and reference tracking. It has also been proposed a different approach to model the robot dynamical system using Conformal Geometric Algebra.
Project Details
Site: Automatic Control Laboratory
Since: May 2014