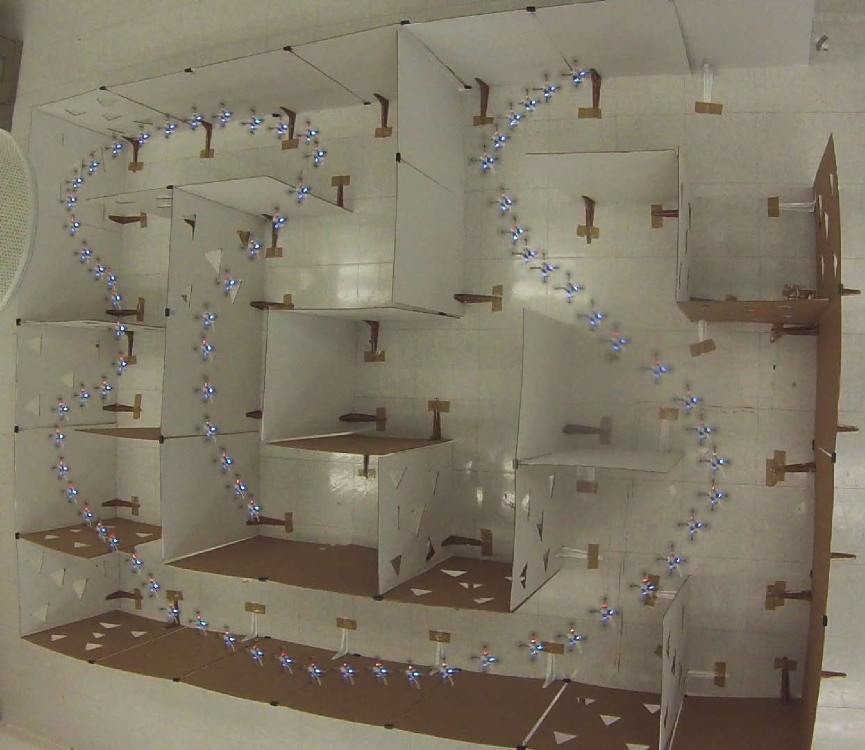
This paper presents a method for online trajectory planning in known environments. The proposed algorithm is a fusion of sampling-based techniques and model-based optimization via quadratic programming. The former is used to efficiently generate an obstacle-free path while the latter takes into account the robot dynamical constraints to generate a time-dependent trajectory. The main contribution of this work lies on the formulation of a convex optimization problem over the generated obstacle-free path that is guaranteed to be feasible. Thus, in contrast with previously proposed methods, iterative formulations are not required. The proposed method has been compared with state-of-the-art approaches showing a significant improvement in success rate and computation time. To illustrate the effectiveness of this approach for online planning, the proposed method was applied to the fluid autonomous navigation of a quadcopter in multiple environments consisting of up to 200 obstacles. The scenarios hereinafter presented are some of the most densely cluttered experiments for online planning and navigation reported to date.
A Hybrid Method for Online Trajectory Planning of Mobile Robots in Cluttered Environments
aerial-robotics
autonomous-vehicle-navigation
collision-avoidance
motion-path-planning
Inverse Kinematics for a 6-DOF Walking Humanoid Robot Leg
inverse-kinematics
bipedal-walking
conformal-geometric-algebra
clifford-algebra

This paper describes a novel method for solving the inverse kinematics of a humanoid robot leg anthropomorphically configured with 6 degrees of freedom using conformal geometric algebra. We have used different geometric entities such as lines, planes, and spheres in order to achieve the desired position and orientation of the body and the foot, individually reconfiguring the amount of rotation for each joint. The proposed method can be used in a future work to design obstacle avoidance and self collision algorithms. The effectiveness of the proposed algorithm is proved via practical experiments. Results indicate that the proposed algorithm achieves the expected behavior.