The setup consists of an Optitrack motion capture system that provides localization with sub-millimeter accuracy. The motion capture software and the trajectory planning algorithm were run on the same computer.
The current position of the quadcopter and the corresponding reference point are broadcasted every 6 ms.
The firmware of the used platform, Crazyflie 2.0, was modified to implement a custom nonlinear control algorithm for precise trajectory tracking.
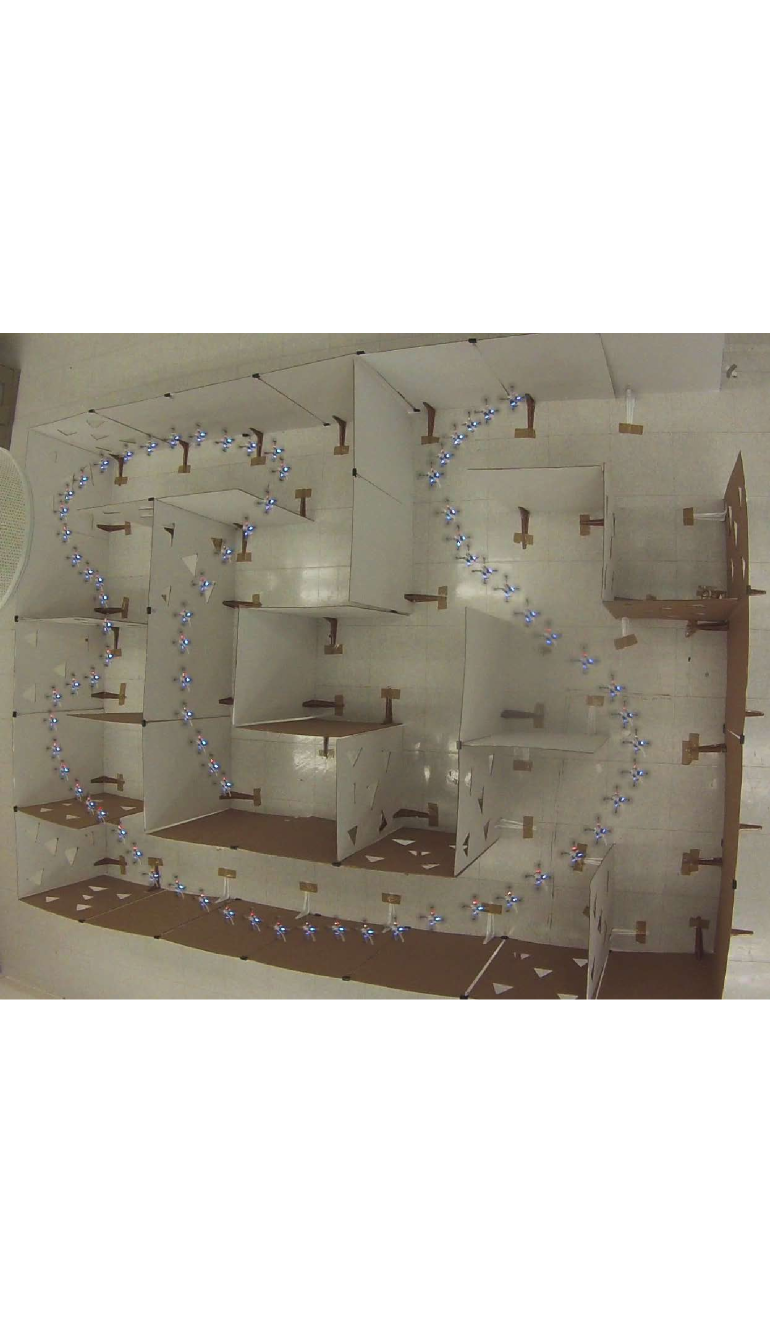
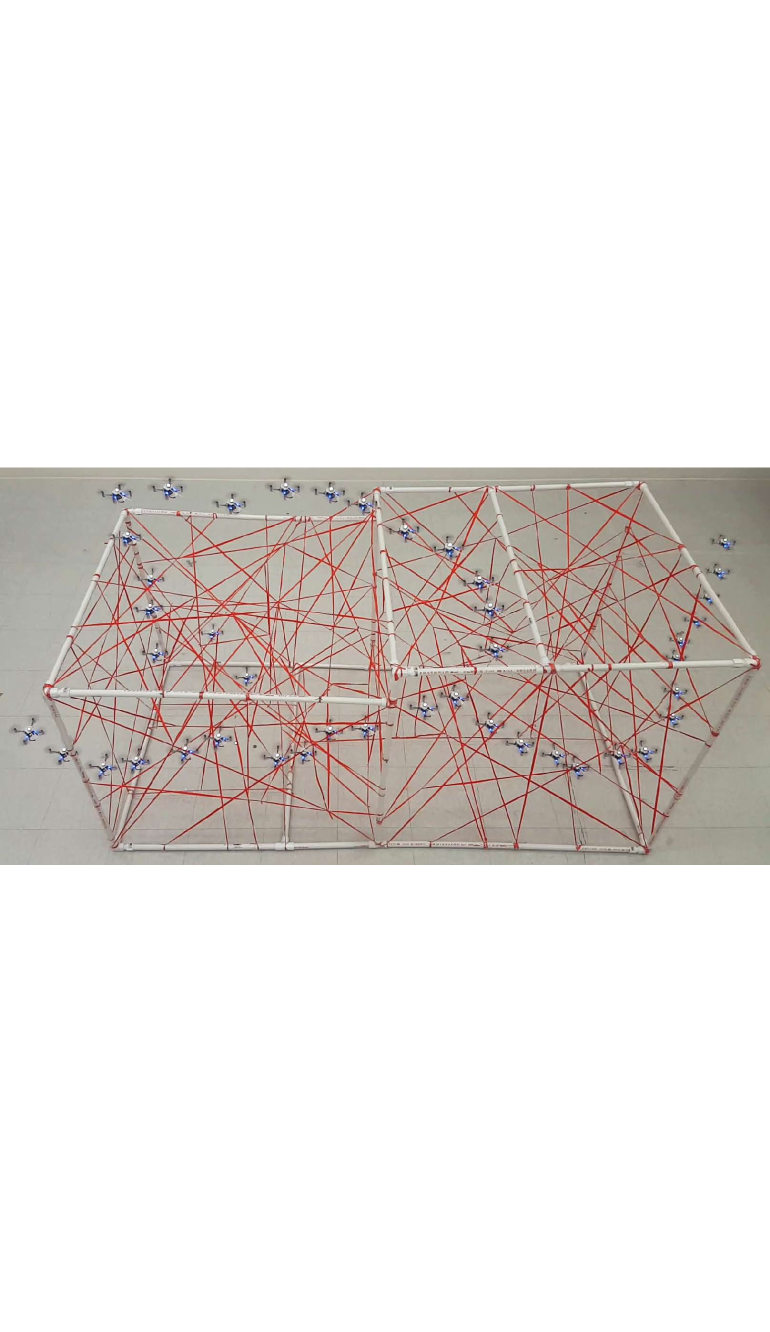
The algorithms have been proved in some of the most densely cluttered environments for online planning and navigation reported to date.
Project Details
Site: Multi-Agent Autonomous Systems Lab
Since: Aug 2015